
电子皮肤让机器人活了?有光就能发电无需传感
近几年有不少关于电子皮肤的研究突破,它本质上是一种电子检测装置,用于模拟人体皮肤的特性和功能,帮助采集人体的各种生理信号、以及感知不同的环境刺激,实现人工触觉的最基本功能。
除了人工义肢、医疗检测和诊断等方面的应用前景,电子皮肤最直接的应用就是机器人。通过电子皮肤赋予机器人触觉后,机器人能更充分、更精准地获取环境中的压力信号,从而也能实现更多样和有效的行动。例如,传统机器人缺乏对物体精确的力量反馈,对尺寸较小、柔软的物体也很难精确地进行抓握和操纵。
而电子皮肤则可提供精细的力学反馈,帮助机器人完成准确的抓握和操纵任务。
人类皮肤的触觉是难以模拟的,电子皮肤还需要具有弹性、延展性、温度感知、压力感知等特性。此外还得能读取数据。如何提高电子皮肤的续航,也一直是业界的一大挑战。
英国格拉斯哥大学研究团队提出的解决方案是:利用太阳能。
早在 2017 年,格拉斯哥大学的团队研发出了一款灵活的 “电子皮肤” 系统,通过添加了由石墨烯制成的感光发电传感器,该电子皮肤可感受压力、并且反应很快。通过利用石墨烯,他们还降低了这种电子皮肤的能源消耗,1 平方厘米的面积需要的能源仅 20mW,相当于很小的光伏电池。

格拉斯哥大学的研究者还利用假肢,对电子皮肤进行了测试。结果显示:当电子皮肤上的贴片启用后,假肢能够像正常手一样感觉并握住软物体;但是当不再使用皮肤贴片时,假肢将会把物体捏碎。
当时该研究团队考虑的不仅是电子皮肤的灵活性、或者分布式传感器的性能,其也在考虑如何使电子皮肤能够自己供能。
也就是说,在赋予了电子皮肤触觉之后以及降低能耗之后,研究人员还希望它能够 “自给自足”。
三年之后,这个问题也解决了。格拉斯哥大学的研究者近期在发表在IEEE Transactions on Robotics 上的论文,描述了包裹在其柔性太阳能皮肤中的机器人手,是如何在不使用专用和昂贵的触摸传感器的情况下与物体进行互动的。这种新型能发电的合成皮肤,可创造出价格更低的假肢和能够感知的机器人。
这是格拉斯哥大学可弯曲电子和传感技术 (BEST) 小组由 Ravinder Dahiya 教授领导下在电子皮肤方面的最新发展。

研究中,他们展示了一种创新的电子皮肤,嵌入了太阳能电池和微小 LED 的合成聚合物,具有触摸和近距离感应功能,无需使用专用的触摸传感器。

为了解决续航问题,研究人员开发出一种由微型太阳能电池制成的电子皮肤,而且没有专门的触摸传感器。近年来,触摸敏感的电子皮肤在假肢和机器人中有许多实验性应用,但该项目是第一个能够在不使用专用触摸传感器的情况下提供触摸反馈的自发电电子皮肤。
不像其他同等设备需要额外的触摸传感器,这种没有传感器的电子皮肤不需要传统的电源支持,事实上,电子皮肤本身就是能量的来源,能够为手部和相连的设备供电。所产生的电力还可以储存在该团队开发的柔性超级电容器等设备中,所以这种电子皮肤不需要经常暴露在阳光下也能工作。
太阳能电池不仅能自己发电,电池产生的能量也足以为控制手部运动的微型执行器供电,而且还有一些额外的功能,通过测量太阳能电池输出的变化,可以为触摸和近距离感应提供触觉功能。
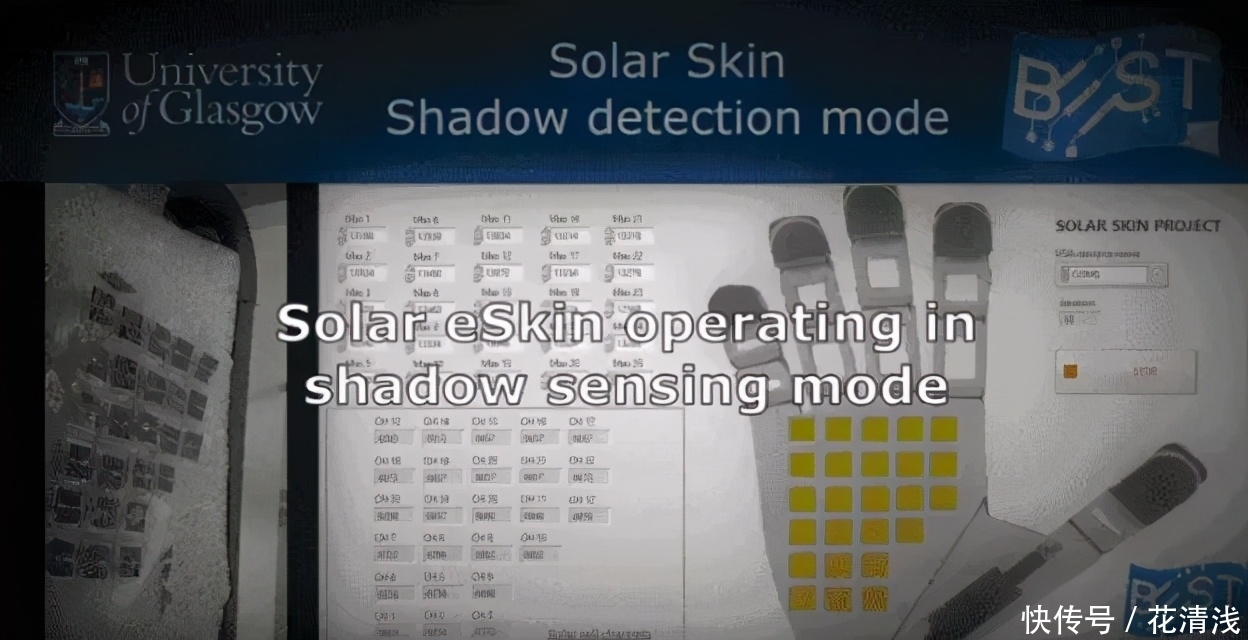
只要有光,电子皮肤上的太阳能接触到光照,电池就会自行发电。如果电池被接近的物体所遮挡,光的强度就会降低,因此产生的能量也会降低,当电池与物体接触时就会降为零。
该团队使用红外 LED 与太阳能电池进行近距离感应,太阳能电池之间的简单 LED 会将红外光从接近的物体上反射出来以评估距离,并将两种形式的光测量结合在一起,以达到更好的效果。
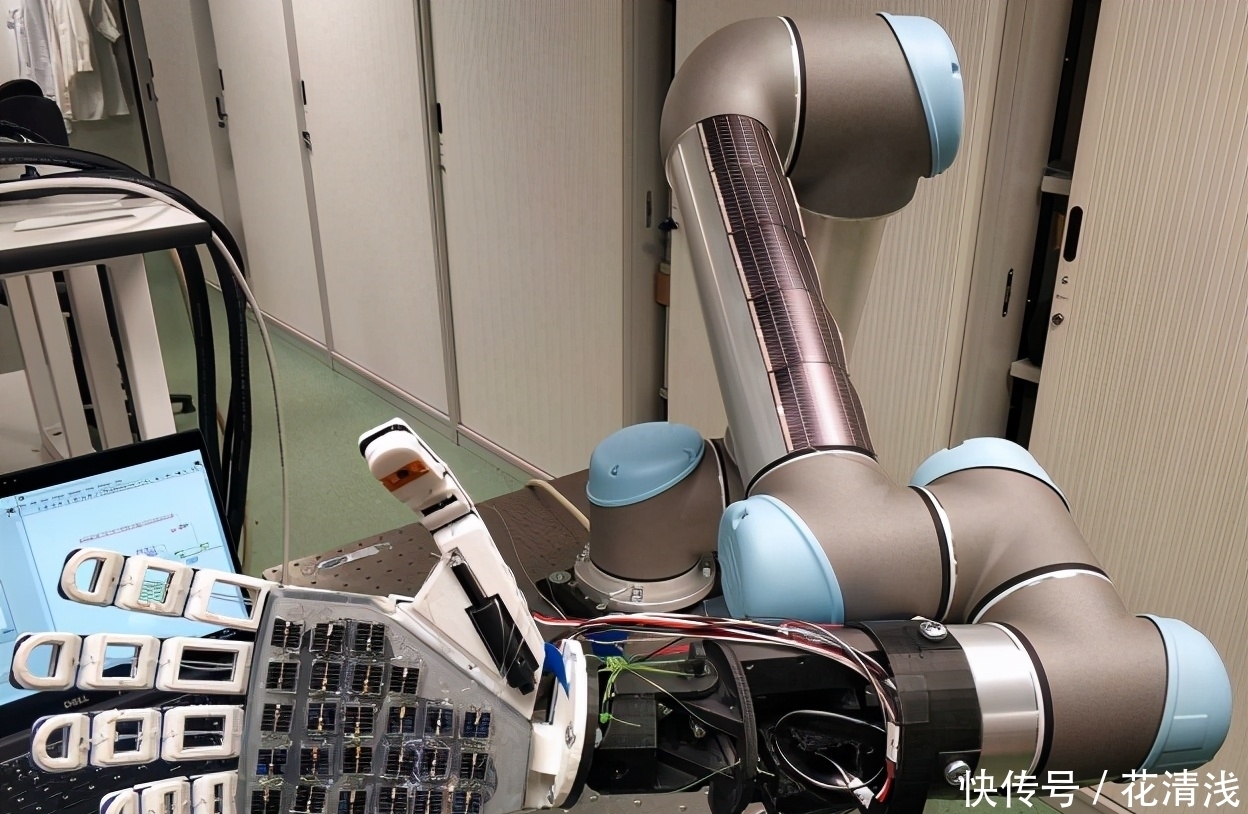
为验证他们的概念,研究人员将一只通用的 3D 打印机械手包裹在他们的电子皮肤上,然后记录其与环境的互动。测试显示,覆盖电子皮肤的机械手臂产生的能量约为 383.3 兆瓦。他们在论文中报告说:“如果在整个身体区域都存在电子皮肤(约占 1.5 平方米的区域),可以产生超过 100 W 的能量”。下图最下方部分为覆有电子的机器手的 3 个子系统,从下至上依次是能量管理、传感、驱动。
下一篇:没有了